Поиск по тегам : электродвигатель, асинхронные, синхронные, с фазным ротором, с короткозамкнутым ротором, постоянного тока
|
Каталог статей Поиск по тегам : электродвигатель, асинхронные, синхронные, с фазным ротором, с короткозамкнутым ротором, постоянного тока |
| Асинхронные эл. двигатели переменного тока с короткозамкнутым ротором |
|
Асинхронные электрические двигатели переменного тока с короткозамкнутым ротором состоят из двух основных узлов: статора и ротора. Ротор это та часть двигателя, которая вращается внутри статора. С конструктивной точки зрения ротор – тело вращения, что означает симметрию относительно оси вращения. Ротор, в принципе , очень прост и вполне надежен. Выглядит он как обычная цилиндрическая болванка с торчащими концами вала, но это только кажется, что ротор прост. Изготавливается он из разных материалов и с довольно точными размерами.
Сердечник ротора получается не однородным. Но зачем такая сложность в изготовлении? Понятное дело, шихтовать сердечник из отдельных пластин приходится не для забавы. Дело в том, что при переменном токе магнитный поток, который проходит по сердечнику тоже переменный. При этом в каждой пластине наводятся вихревые токи, которые выделяются в виде тепла. Вихревые токи паразитные так, как нагрев сердечника, собственно, нам не нужен. Задача любого эл. двигателя - преобразовывать электрическую энергию в механическую. Нагрев - это потери эл. энергии и снижение КПД машины. Как показывает практика, чем толще пластины, тем выше потери. Причём, толщина пропорциональна квадрату потерь. Если выполнить сердечник из цельного металла, то двигатель превратится в печку. С другой стороны, уменьшать толщину отдельных пластин тоже нельзя до бесконечности так, как требуется механическая прочность. При вращении 3000 об/мин возникает достаточно высокая нагрузка, и сердечник может, просто, разорвать центробежной силой.
Статор и ротор - основные и обязательные составляющие асинхронного эл. двигателя, но, конечно, в двигателе обязательно присутствуют и подшипниковые узлы. В разных исполнениях в конструкцию эл. двигателя может входить ещё многие детали, такие как барно, вентилятор принудительной вентиляции с кожухом или без и т. д., тем не менее, принцип действия асинхронного эл. двигателя переменного тока с к.з. ротором от таких особенностей не зависит. Принцип действия «коротышей» определяет статор с обмоткой и ротор, тоже с обмоткой. Если коротко и примитивно объяснять, как работает асинхронный эл. двигатель, то можно обойтись несколькими предложениями. При подаче переменного напряжения на обмотку статора в статоре образуется вращающееся магнитное поле, которое увлекает за собой ротор. Ротор немного отстаёт по скорости вращения от поля статора, поэтому эти двигатели называются асинхронными. Согласитесь, что такое объяснение не даёт полной картины происходящих процессов в двигателе. Конечно, нас интересует, например, пуск двигателя, холостой ход, рабочий режим, пределы нагрузки. Любое устройство требует к себе более пристального внимания и более глубокого знания частностей, так как возникновение каких-то неполадок (особенно их устранение) может поставить дилетанта в тупик. К тому же, не мешало бы знать самую простую бытовую необходимость: «А правильно ли работает устройство, или его нужно срочно выключить?»
Что дальше? Частота вращения ротора будет возрастать, но не до бесконечности. Предельная частота вращения это частота вращения вращающегося поля статора. Однако ротор не может вращаться синхронно с полем статора, так как при синхронном вращении магнитное поле статора не будет пересекать проводники ротора, а это означает, что ток ротора, в таком случае, будет отсутствовать. Значит, частота вращения ротора, в любом случае, будет несколько меньше частоты вращения поля статора. Эта разница называется скольжением. Если к валу эл. двигателя приложить какую-либо нагрузку (отрицательный момент), то величина скольжения увеличится, и момент двигателя возрастёт. На самом деле, когда никакой нагрузки нет, т.е. в двигатель находится режиме холостого хода, все-таки небольшой тормозной момент существует от трения в подшипниках. Однако, величина скольжения на холостом ходу близка к нулю.
Таким образом, асинхронный эл. двигатель переменного тока с к.з. ротором становится не работоспособным при увеличении нагрузочного момента выше определённой критической точки. Номинальный момент существует только при незначительном уменьшении частоты вращения. Учитывая это обстоятельство, эксплуатировать такие эл. двигатели можно только с точно рассчитанной нагрузкой и загодя подбирать эл. двигатель определённой мощности и с определённой частотой вращения. Малейшая перегрузка недопустима. Механизм может остановиться, как будто эл. двигатель отключили от сети. Есть ещё один минус. Асинхронные эл. двигатели имеют фиксированную частоту вращения, зависящую от частоты питающего переменного напряжения и числа пар полюсов обмотки статора. Плавно регулировать частоту вращения ротора не получается. Если учесть, что в сети переменного напряжения частота равна 50 Гц, то фактически, частота вращения магнитного поля эл. двигателя переменного тока будет зависеть только от количества пар полюсов. Ω=2πf/p =2πn/60 , где Ω - угловая скорость поля статора; f – частота подводимого напряжения; n – частота вращения поля. В результате имеем формулу для расчета синхронной частоты вращения: n=60 f/p=3000/p (при f=50 Гц) из которой видно, что фиксированные синхронные частоты будут: p=1, n=3000 об/мин, p=2, n=1500 об/мин, p=3, n=1000 об/мин, p=4, n=750 об/мин, p=5, n=600 об/мин, и т.д. Наиболее ходовые скорости в промышленности 3000 об/мин, 1500 об/мин, 1000 об/мин, 750 об/мин. Вообще, всегда стараются в механизмах использовать эл. двигатели с большими частотами вращения, т.к. количество пар полюсов достаточно заметно увеличивает габариты и стоимость эл. двигателя. Если сравнить эл. двигатель одной и той же мощности, то с меньшим количеством пар полюсов машина имеет меньшие габариты. Очень часто можно встретить эл. двигатели переменного тока с большим количеством выводных концов. Это типичный пример обхода трудностей с регулировкой частоты вращения. Обмотки хитро рассчитываю на две скорости или четыре скорости. Получаются многоскоростные эл. двигатели. Это не очень удобно, но все-таки выход. При подключении разных выводных концов к сети двигатель работает на разных частотах вращения. |
||
 Асинхронные эл. двигатели самые распространенные эл. двигатели во всем мире. Простота их конструкции, и низкая стоимость вполне может характеризовать «коротыши» самым положительным образом. Принцип действия этих двигателей можно рассматривать только в контексте
Асинхронные эл. двигатели самые распространенные эл. двигатели во всем мире. Простота их конструкции, и низкая стоимость вполне может характеризовать «коротыши» самым положительным образом. Принцип действия этих двигателей можно рассматривать только в контексте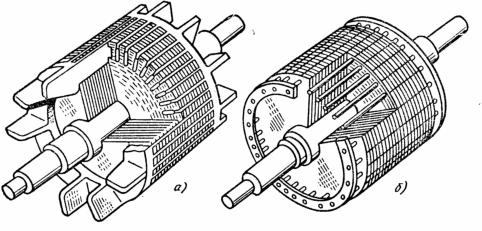 В роторе имеется обмотка, но увидеть её не представляется возможным так, как обмотка эта выполняется довольно необычным образом. Обмотку заливают в пазы ротора расплавленным алюминием. Иногда её выполняют из медных стержней, которые забивают в пазы и приваривают по обоим концам к медным кольцам. В результате, получается, что обмотка в роторе короткозамкнутая и выглядит она как «беличья клетка».
В роторе имеется обмотка, но увидеть её не представляется возможным так, как обмотка эта выполняется довольно необычным образом. Обмотку заливают в пазы ротора расплавленным алюминием. Иногда её выполняют из медных стержней, которые забивают в пазы и приваривают по обоим концам к медным кольцам. В результате, получается, что обмотка в роторе короткозамкнутая и выглядит она как «беличья клетка».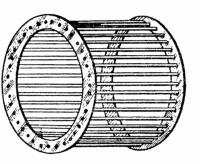 Такие обмотки довольно массивные и поэтому механически прочные. Если эл. двигатель будет работать в штатном режиме или при кратковременных перегрузках, то такая обмотка практически вечная. Отсюда и высокая надёжность всего асинхронного эл. двигателя с к.з. ротором.
Такие обмотки довольно массивные и поэтому механически прочные. Если эл. двигатель будет работать в штатном режиме или при кратковременных перегрузках, то такая обмотка практически вечная. Отсюда и высокая надёжность всего асинхронного эл. двигателя с к.з. ротором. 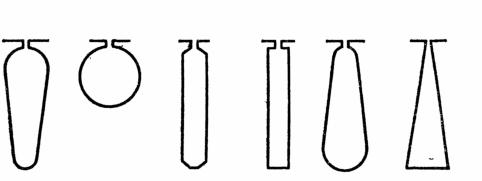 Теперь посмотрим на сердечник ротора. Он изготавливается не из однородного куска металла, а набирается из отдельных пластин из специальной электротехнической стали. Толщина каждого листа может быть от 0,25 до 0,5 мм. Каждая пластина в сердечнике ротора изготавливается штамповкой. Пластины имеют форму круга. По внешнему радиусу вырубаются пазы
Теперь посмотрим на сердечник ротора. Он изготавливается не из однородного куска металла, а набирается из отдельных пластин из специальной электротехнической стали. Толщина каждого листа может быть от 0,25 до 0,5 мм. Каждая пластина в сердечнике ротора изготавливается штамповкой. Пластины имеют форму круга. По внешнему радиусу вырубаются пазы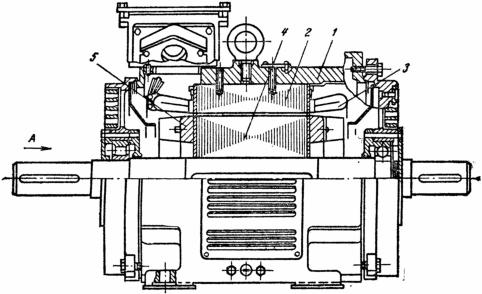
 В отличии от ротора, статор неподвижная часть эл. двигателя. Однако сердечник статора тоже выполняется из отдельных штампованных пластин. Пластина статора напоминает больше кольцо с пазами по внутреннему радиусу. В пазы укладывается обмотка, которая подключается к сети переменного тока.
В отличии от ротора, статор неподвижная часть эл. двигателя. Однако сердечник статора тоже выполняется из отдельных штампованных пластин. Пластина статора напоминает больше кольцо с пазами по внутреннему радиусу. В пазы укладывается обмотка, которая подключается к сети переменного тока. 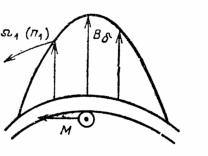 Теперь давайте рассмотрим принцип действия асинхронного эл. двигателя переменного тока с к.з. ротором более пристально. В трёхфазной системе питающей сети обмотки статора создают вращающееся магнитное поле. В начальный момент, когда ротор неподвижен, магнитный поток статора пересекает проводники обмотки ротора. Как известно, при пересечении магнитных линий с витком в последнем наводится ЭДС. Так как обмотка ротора замкнута, то в ней возникнет ток. Этот ток, взаимодействуя с магнитным полем, создает вращающий момент, под воздействием которого ротор придет во вращение. Направление вращения ротора будет совпадать с направлением вращения поля статора.
Теперь давайте рассмотрим принцип действия асинхронного эл. двигателя переменного тока с к.з. ротором более пристально. В трёхфазной системе питающей сети обмотки статора создают вращающееся магнитное поле. В начальный момент, когда ротор неподвижен, магнитный поток статора пересекает проводники обмотки ротора. Как известно, при пересечении магнитных линий с витком в последнем наводится ЭДС. Так как обмотка ротора замкнута, то в ней возникнет ток. Этот ток, взаимодействуя с магнитным полем, создает вращающий момент, под воздействием которого ротор придет во вращение. Направление вращения ротора будет совпадать с направлением вращения поля статора.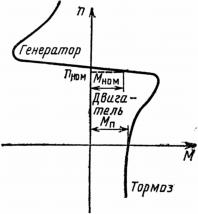 Что ж, теперь давайте посмотрим как эл. двигатель будет себя вести в случае увеличения нагрузочного момента. Сначала это будет почти прямая линия. Увеличение нагрузки ведёт к увеличению скольжения и, разумеется, незначительно падает скорость, но стремительно возрастает момент. Но вот беда (и это большой минус асинхронных эл. двигателей) дальше происходит ужасное. Достигнув критической точки, происходит резкое падение частоты вращения ротора до полной остановки, резко увеличивается ток в обмотке статора и ротора.
Что ж, теперь давайте посмотрим как эл. двигатель будет себя вести в случае увеличения нагрузочного момента. Сначала это будет почти прямая линия. Увеличение нагрузки ведёт к увеличению скольжения и, разумеется, незначительно падает скорость, но стремительно возрастает момент. Но вот беда (и это большой минус асинхронных эл. двигателей) дальше происходит ужасное. Достигнув критической точки, происходит резкое падение частоты вращения ротора до полной остановки, резко увеличивается ток в обмотке статора и ротора.